Guide to Robotic Arms

The word robotic arm may remind you of the Terminator scene in which Arnold Schwarzenegger removed his skin to reveal a mechanical arm underneath. But that is not what modern robotic arms look like. The mechanical arms helping us around various industries are usually motor-driven machines with a series of joints, articulations and manipulators to replicate the functioning of a human arm.
Robotic arms are the most iconic piece of equipment in an industrial setting. People are fascinated by their strength and speed, yet most don't understand how helpful this machinery can prove in the right setting. This guide explores various aspects of robotic arms to solve the mystery surrounding this fascinating device.
What is a Robotic Arm?
A robot arm is a collection of usually programmable mechanical devices designed to manipulate various objects like a human arm. The first robotic arm, Unimate #001, was made in 1959 by George Devol, which was awarded a patent in 1961. It was invented as a general purpose machine to move different materials. Devol and his partner Joseph Engelberger, also known as the Father of Robotics, paved a path for robots that were till that time a figment in science fiction.
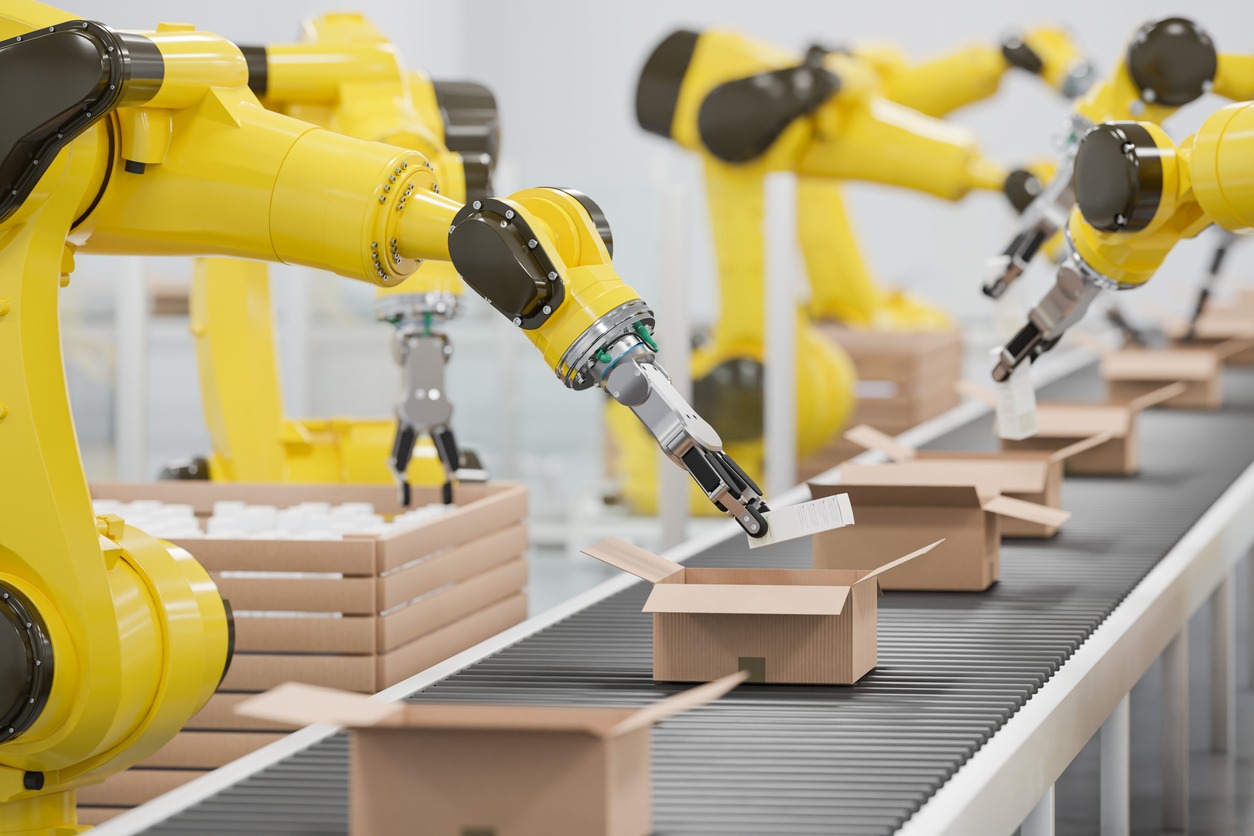
Robot arms have become a reliable part of many manufacturing areas since then. These days, robotic arms are widely used for tasks that are too difficult, tedious, or dangerous for a human being. And it's not just the automobile industry we are talking about (though robotic arms are an integral part of the car manufacturing process), this advanced machinery is useful in various sectors of life, including medical, agricultural, industrial, and packaging processes.
Types of Robotic Arms
“Robotic arm" is a broad term that describes a group of robotic systems. All these mechanisms may have similar applications, but the way they are programmed to serve that purpose makes them different from one another. In simple words, robotic arms are categorized into different types according to how well they are optimized for certain tasks. These types include:
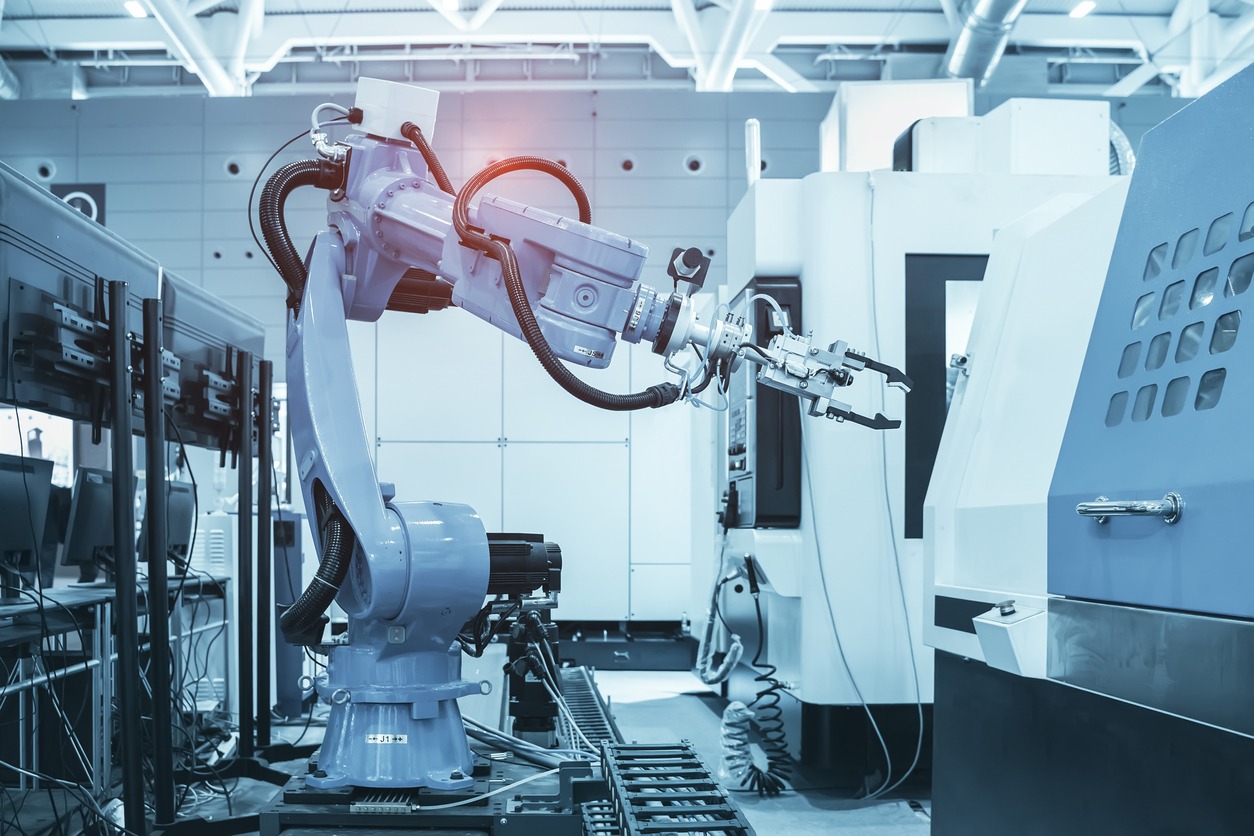
Articulated Arm
The articulated arm is a general purpose robot device featuring five or more joints. The higher number of connection points means these robot arms have some degree of freedom. This type includes a vast array of mechanical arms currently used in the industrial sector. The two most common types of articulated arms being used in various industries are six-axis robots and collaborative robot arms.
Six-axis robotic arm
The six-axis robot arms are articulated with six degrees of freedom. They have four to six joints and can move quite freely. Being very flexible, these robotic devices help conduct a vast array of tasks. There is an impressive list of uses that a six-axis mechanical device can serve, including welding, assembly, handling, and removal.
Collaborative robot arm
The Collaborative robot arms are designed for hybrid work. Meaning, they are designed to work in close proximity to humans. This is a newer type of mechanical arm with its uses still being explored. However, its unique safety features are proving to be quite beneficial in reducing the risk factor in hybrid working environments.
SCARA(Selective Compliance Assembly Robot Arm)
The SCARA arms have a more limited range of mobility than articulated arms. They are selectively compliant devices with three axis (X, Y, and Z) motion combined with rotational movement. This may limit these arms in some respects, but gives them certain advantages over articulated arms. For example, SCARAs perform better in lateral motions, move more quickly, and integrate more easily. They are useful in applications such as biomedical applications, and assembly lines.
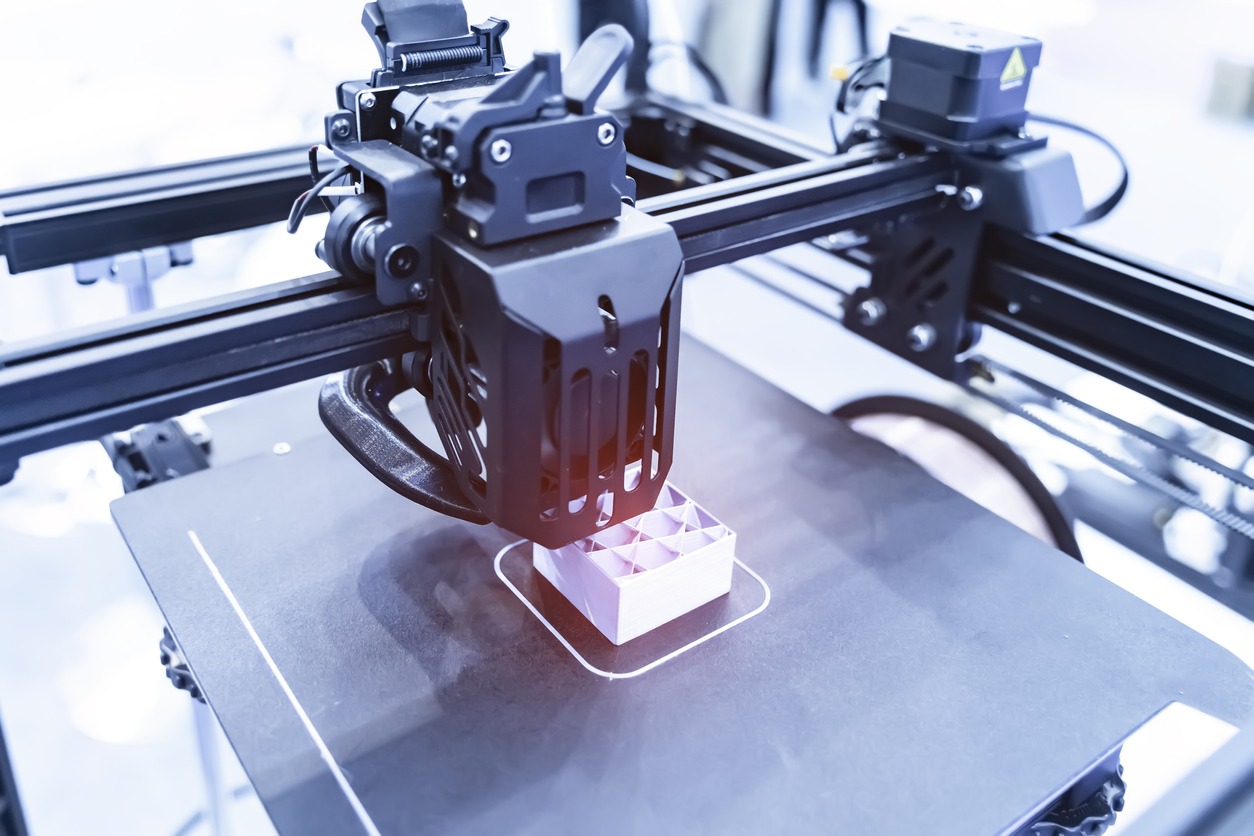
Cartesian / Gantry Arms
These robot arms are rigid systems designed to move in a 3D plane. They have 3 linear actuators. The first moves right and left along the X axis. The second one is connected with this actuator and moves up and down in the Y-axis plane. Lastly, the third actuator is attached to the Y axis actuator and moves back and forth along the Z axis. These are typically used for small applications, such as 3D printing. But there are endless possibilities with the adjustment option for speed, precision, stroke length, and size of the robot arm.
Cylindrical Robot Arms
The cylindrical robotic systems consist of a single arm that follows the cylindrical coordinate system (vertically). All the programmed movements in this type of arm happen in a cylindrical shaped area. These arms are deployed in operating assembly systems, welding and machine tool handling. The rotary and prismatic joints give these arms both linear and horizontal movement.
Spherical / Polar Robot Arm
Just like cylindrical arms, spherical or polar models feature a single arm. But these arms also have a rotary axis in addition to the linear vertical axis. This feature and the twisting joint at the base allow the polar arms to move within a spherical area. These are the most simple type of robot arms that are used for simple tasks that don't involve high speed or complex movements.
Parallel / Delta Robotic Arm
If you want high speed robotic automation, parallel or delta arms are the go-to option. These consist of three arms installed on a single base, on top of a work surface. They have a unique dome shape that allows delicate and precise movements at a high speed. Parallel robot arms are often used for lightweight and high speed tasks related to food, electronics, and pharmaceuticals.
Anthropomorphic Arm
Anthropomorphic robotic systems feature two or more arms along with a friendly appearance. They are a rare sight in an industrial setup because they are designed to replicate a human hand. They have joints that mimic the movement of a human arm with an independent thumb and fingers. You will find these in collaborative environments, working side by side with human operators.
Robotic Arm LOSTPED Parameters

Now that you know about the different types of mechanical arms and their uses, let explore a bit about the robotic arm LOSTPED parameters (load, orientation, speed, travel, precision, environment and duty cycle).
Load
All robotic arms have a load capacity and different robots are supported by different frameworks. A robotic arm is picked and deployed based on its load capacity.
Orientation
Mounting and positioning of a robotic arm is a big concern for any factory owner. Certain types of arms require more space whereas others can fit into a tight space.
Speed
The speed of the arm must not outrun that of other machinery and vice versa.
Travel
Travel refers to the traveling distance between the payloads and workstations. Some robot arms lose their accuracy if they have to travel over a wide span. So this factor also determines what robot should be deployed for certain jobs.
Precision
Some robotic arms are designed to be more precise than others. This precision, however, may come with some tradeoffs such as speed, footprint, orientation, or travel distance.
Environment
Environmental conditions such as the atmospheric conditions and other potential hazards like dirt and moisture need to be taken into account when building a robotic system. It is also important to compare the arm's dimensions, orientation, and range of movement and how these will work out together in a particular environment.
Duty Cycle
It refers to the evaluation of how intensively the robot will be working. Every machine needs a rest or maintenance period, otherwise there is risk of more wear and tear than usual. Similarly, every robotic arm has its own maintenance regime, such as before deployment and post-deployment.
Conclusion
Robotic arms have evolved from being mechanical tools to integrated systems that are making processes more efficient across different industries. The virtually intelligent, electro-mechanical machines are being used in a wide range of industries including assembly, welding, packaging, material handling, inspection, dispensing, cutting and palletizing. They are one of the most cutting–edge innovations of mankind in the 20th century and are at the heart of the ‘automation revolution’, which is already happening at a rapid pace.